
Na celém včerejším přistání na Marsu je spousta technicky nádherných okamžiků. Třeba to jak je v průběhu přistání automaticky rozpoznáno vhodné místo k přistání
Komunikační a sledovací síť do niž je zapojeno několik dalších sond na oběžné dráze Marsu. Komunikaci k zemi zajišťoval sonda TGO, která je společným podnikem ESA a ruského Roscosmosu a je na orbitě někdy od 2016. Obdobně Mars Reconnaissance Orbiter, který s velmi slušným teleobjektivem a další prvky. Prvky strojové rozpoznání obrazu na roveru a nebo roveru, který přistane za pár let a který bude schopen vizuálně hledat připravené vzorky i pod vrstvou marťanského prachu …
Přistání na Marsu
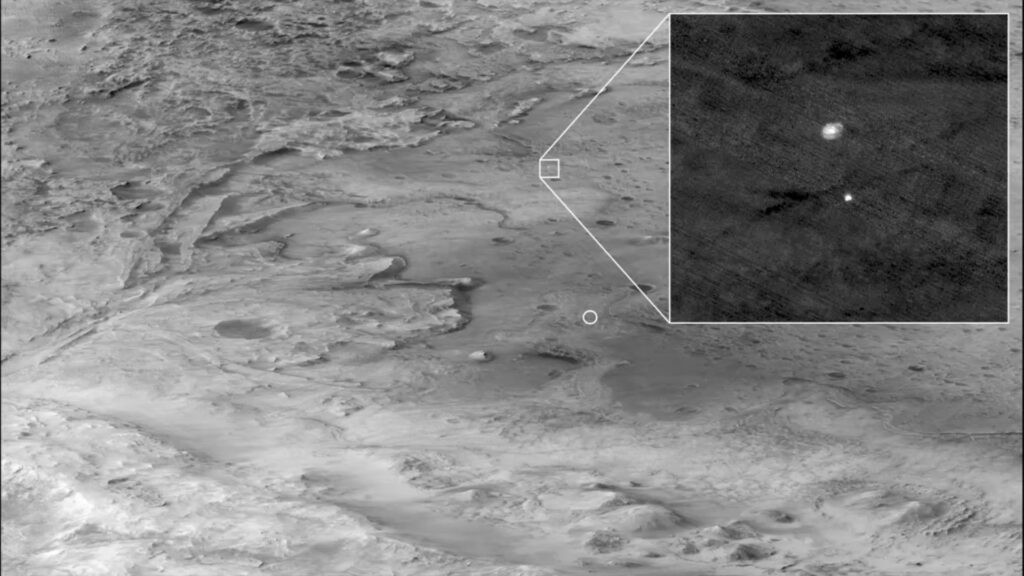
Fotka roveru na na padáku v průběhu přistání jak je zachytila sonda Mars Reconnaissance Orbiter, kterou má na oběžné dráze Marsu NASA od roku 2006. Mimochodem je na ní teleskop, který na povrchu Marsu vidí objekty o velikosti 30 – 60 cm

Tohle bude vůbec zajímavé, tyhle horniny obsahuji “bublinky” z niž bude možné určit jak vypadal atmosféra Marsu v minulosti.
V roce 2026 na Marsu bude vyslán Sample Retrieval Lander v kterém bude „fetch rover“ evropské ESA. Jeho úkolem bude posbírat vzorky připravené Perseverance, která je na povrchu Marsu od včera.
Bude je postupně zanechávat na trase asi 15-20 km, které Sample fetch rover objede, pomoci optického rozpoznání obrazu najde, naloží a pak se vrátí k místu přistání, kde robotická ruka přeloží vzorky do Mars Ascent Vehicle. Ten je vynese na orbit Marsu Tam je sebere evropská družice Earth Return Orbiter a vydá se s nimi k Zemi.
Té by měla dosáhnout v roce 2031